СПРУТКАМ Робот
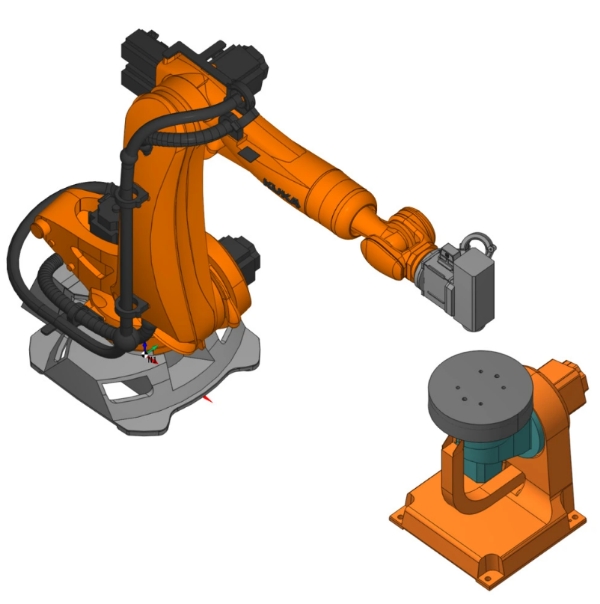
СПРУТКАМ Робот — это специализированное CAD/CAM-решение для оффлайн-программирования промышленных роботов и моделирования роботизированных ячеек. Система позволяет создавать точные траектории движения инструмента с учётом кинематики конкретного робота, поддерживает дополнительное оборудование (позиционеры, рельсы, поворотные оси), проверяет движение на столкновения и зоны сингулярности, а также формирует готовые программы управления для различных марок роботов.
СПРУТКАМ Робот — это универсальное программное обеспечение CAD/CAM уровня, предназначенное для офлайн-программирования промышленных роботов, моделирования их движений и подготовки управляющих программ для задач обработки, сварки, резки, наплавки, покраски и других операций. Система учитывает полную кинематику робота и положения всех элементов роботизированной ячейки, что обеспечивает реалистичную симуляцию и точный расчёт траекторий без необходимости ручного обучения робота на производстве.
Программное обеспечение включает в себя инструменты для создания и воссоздания кинематических моделей роботизированных ячеек с помощью приложения Machine Maker, а также мобильное приложение для калибровки TCP и базы робота по методу two spikes. В СПРУТКАМ Робот реализована поддержка перемещений не только самого робота, но и неограниченного количества дополнительных линейных и поворотных осей, что важно для сложных конфигураций оборудования — например, когда робот движется по рельсу или обрабатывает деталь на поворотном столе.
Система обеспечивает автоматическую оптимизацию движений с учётом ограничений кинематики, предотвращает столкновения и зоны сингулярности, даёт возможность задавать правила управления дополнительными осями вручную или автоматически с помощью «оптимизатора осей робота». Программное обеспечение также содержит библиотеку постпроцессоров для широкого спектра промышленных роботов (KUKA, Fanuc, ABB, Motoman, Staubli и других), что позволяет генерировать управляющие программы для реального оборудования.
В итоге СПРУТКАМ Робот выступает как комплексное решение для автономного программирования и симуляции роботизированных процессов, сокращая время простоя оборудования, повышая точность и надёжность программ управления и снижая затраты на ручную настройку и отладку.
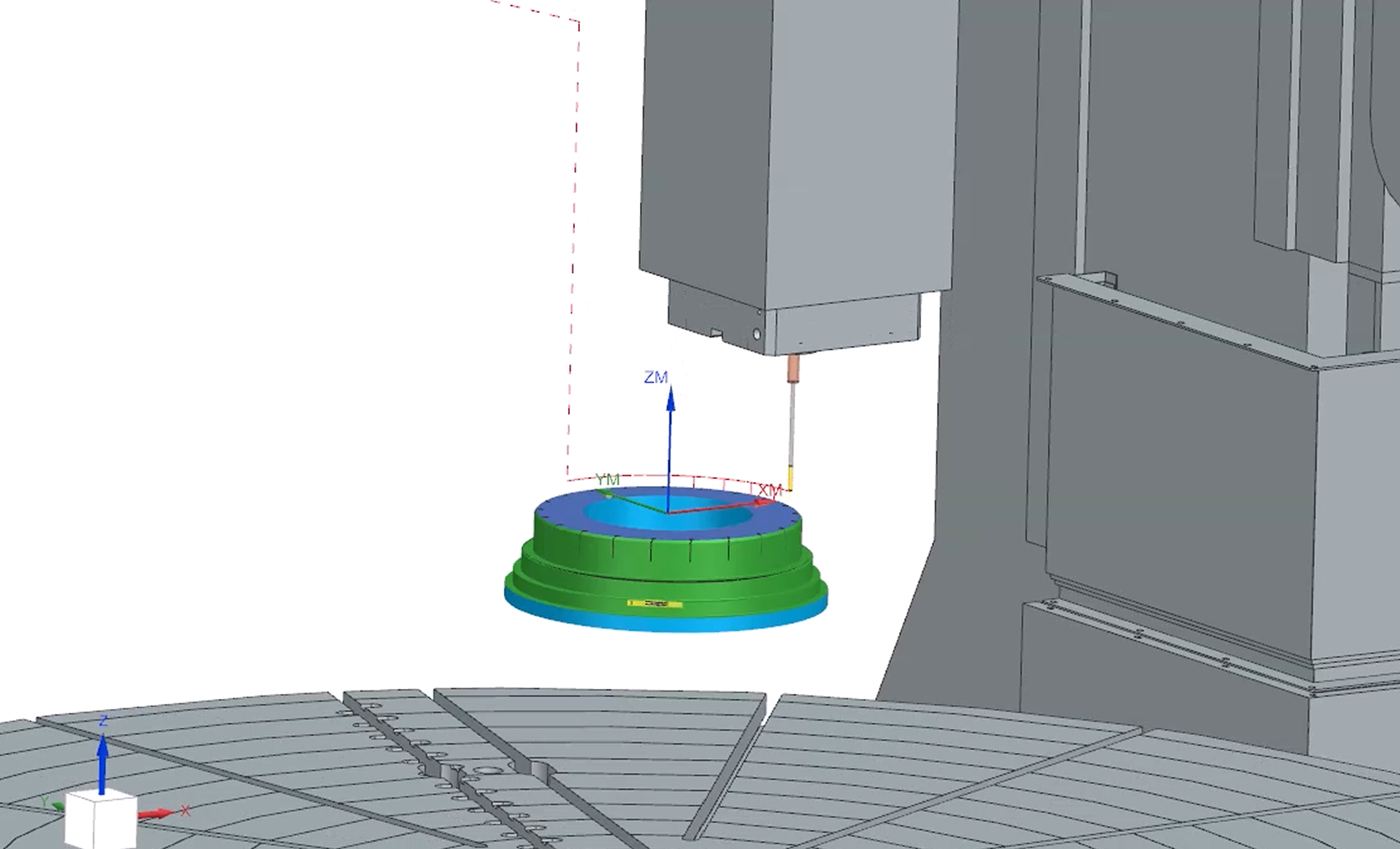
Токарно-карусельный станок с функцией приводного инструмента VTC-2500ATC оснащен стойкой с ЧПУ Fanuc 0i. Данный станок имеет специальную функцию шлифования наружных и внутренних диаметров.

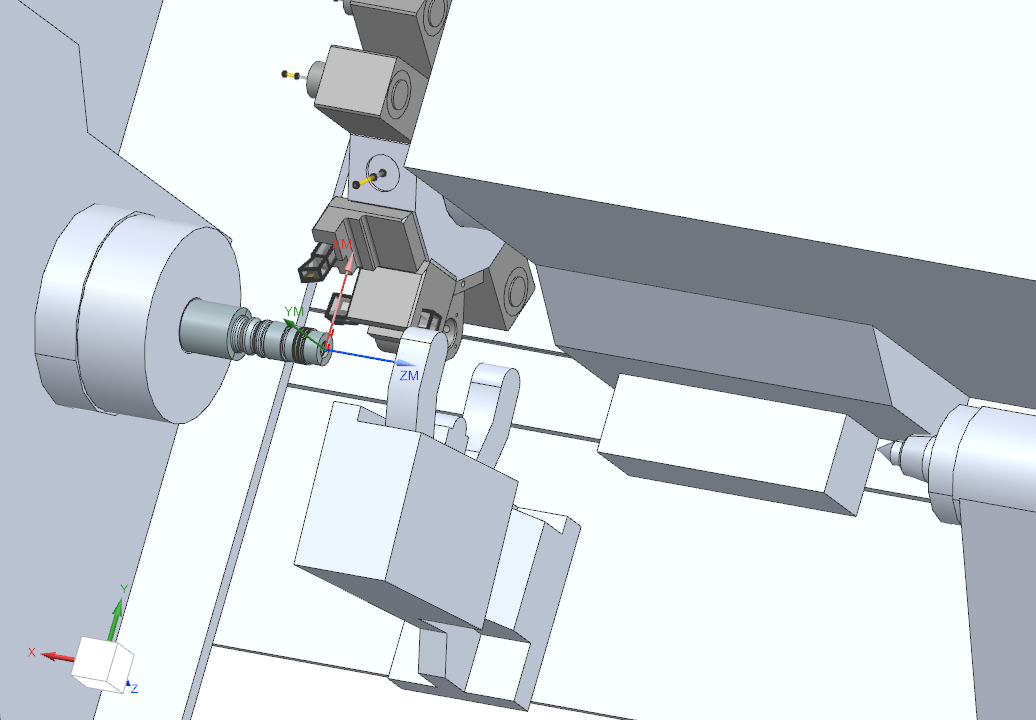
Разработаны решения для токарно-фрезерного обрабатывающего центра CTX GAMMA 1250 TC с системой ЧПУ Sinumerik 840D.

Специалисты ГК «ПЛМ Урал» разработали решение для станка Chiron FZ08 Precision+ включающее в себя постпроцессор, кинематическую модель станка и набор макросов.

Специалисты ГК «ПЛМ Урал» разработали и внедрили решение для программирования станка CMS Ares (стойка ЧПУ OSAI Open) на базе Autodesk FeatureCAM.
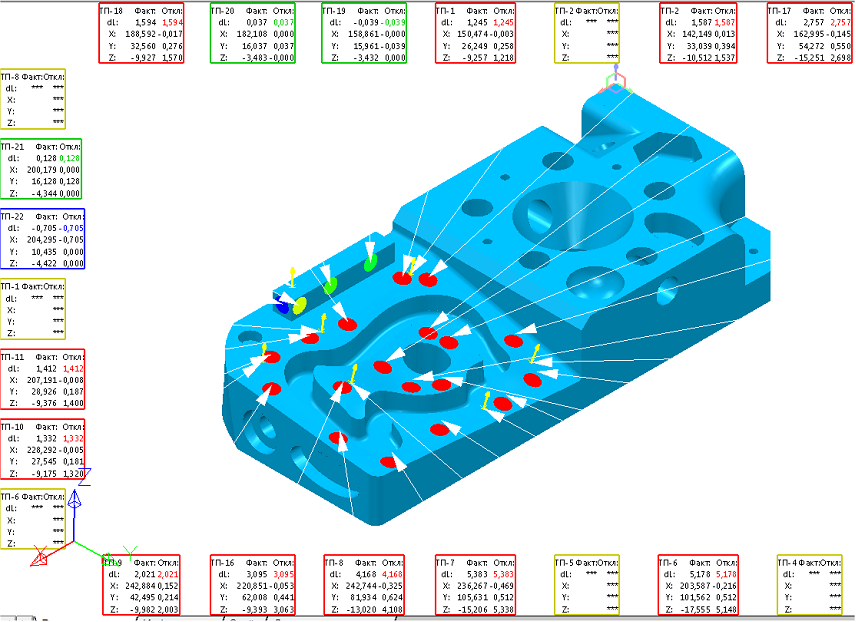
Специалистами ГК «ПЛМ Урал» произведено внедрение технологии адаптивной обработки для заказчика из Московской области.

В модельном производстве широко применяются станки портального типа со сменными шпинделями. Примером такого станка является станок Z1200 итальянского производителя Donatoni. Станок оснащен двумя шпинделями - фрезерным и шпинделем для дисковой пилы.
В данном станке сочетаются возможности фрезерной, сверлильной и токарной обработки, а также возможность автоматического поджима задней бабкой и ручного поджима детали люнетом.
Постпроцессоры и кинематические модели для фрезерного и токарно-фрезерного станков на базе СПРУТКАМ 18

Пробивка композитных материалов необходима для спутывания нитей из разных слоёв композитной ткани, что улучшает механические свойства материала, такие как сопротивление сдвигу и разрыву.
Применение SprutCAM Robot
СПРУТКАМ Робот применяется для программирования и моделирования широкого спектра роботизированных операций:
- Фрезерная обработка на 6-осевых и многокоординатных роботах.
- Лазерная, плазменная и гидроабразивная резка.
- Роботизированная сварка и пайка.
- Аддитивные технологии и наплавка.
- Полировка и шлифование сложных поверхностей.
- Покраска и нанесение покрытий.
- Обработка композитных материалов.
- Работа в составе роботизированных ячеек с позиционерами, линейными направляющими и поворотными столами.
Система позволяет выполнять оффлайн-программирование с полной симуляцией кинематики робота, проверкой столкновений и оптимизацией траекторий движения.
Поддерживаемые роботы
СПРУТКАМ Робот поддерживает широкий спектр промышленных роботов и роботизированных комплексов:
- KUKA
- FANUC
- ABB
- YASKAWA Motoman
- Stäubli
- Universal Robots
- Comau
- Kawasaki
- Denso
- и другие модели промышленных роботов
Поддержка обеспечивается за счет библиотек постпроцессоров и возможности создания собственных кинематических моделей оборудования в модуле Machine Maker.
